Detailed informations on the activity of the teams can be found in the activity reports: 2017, 2018, 2019, 2020, 2021, 2022.
Non-linear computational geometry.
Curved objects are ubiquitous in the world we live in. However, despite this ubiquity and decades of research in several communities, curved objects are far from being robustly and efficiently manipulated by geometric algorithms. Our work on, for instance, quadric intersections and certified drawing of plane curves has proven that dramatic improvements can be accomplished when the right mathematics and computer science are put into motion. In this direction, many problems are fundamental and solutions have potential industrial impact in Computer Aided Design and Robotics for instance. Intersecting NURBS and meshing singular surfaces in a certified manner are important examples of such problems.
Non-Euclidean computational geometry.
Triangulations are central geometric data structures in many areas of science and engineering. Traditionally, their study has been limited to the Euclidean setting. Needs for triangulations in non-Euclidean settings have emerged in many areas dealing with objects whose sizes range from the nuclear to the astrophysical scale, and both in academia and in industry. It has become timely to extend the traditional focus on Rd of computational geometry and encompass non-Euclidean spaces.
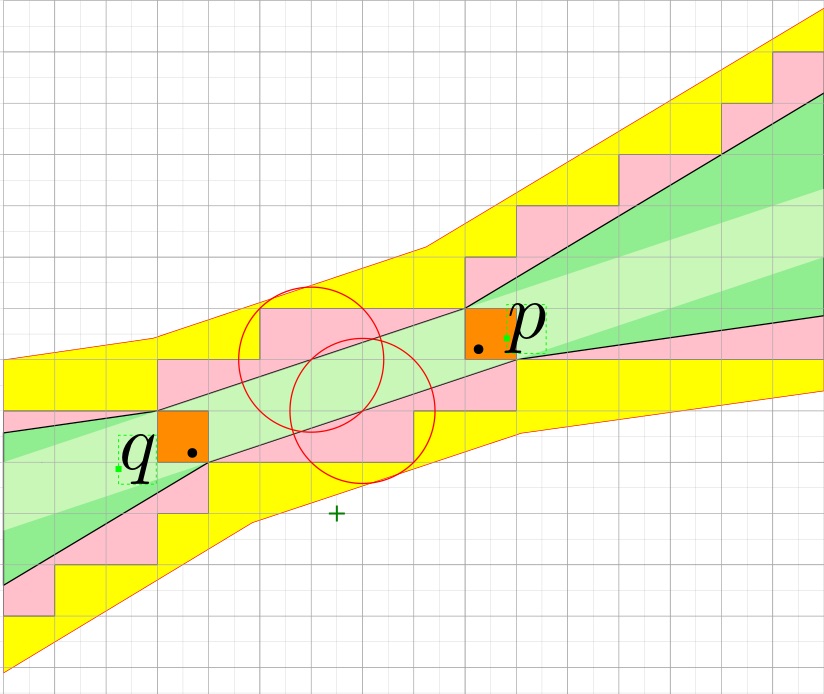
Probability in computational geometry.

The design of efficient algorithms is driven by the analysis of their complexity. Traditionally, worst-case input and sometimes uniform distributions are considered and many results in these settings have had a great influence on the domain. Nowadays, it is necessary to be more subtle and to prove new results in between these two extreme settings. For instance, smoothed analysis, which was introduced for the simplex algorithm and which we applied successfully to convex hulls, proves that such promising alternatives exist.
Discrete geometric structures.
Many geometric algorithms work, explicitly or implicitly, over discrete structures such as graphs, hypergraphs, lattices that are induced by the geometric input data. For example, convex hulls or straight-line graph drawing are essentially based on orientation predicates, and therefore operate on the so-called order type of the input point set. Order types are a subclass of oriented matroids that remains poorly understood: for instance, we do not even know how to sample this space with reasonable bias. One of our goals is to contribute to the development of these foundations by better understanding these discrete geometric structures.